
Been working on the Jam's project for about 6 hours today.
It advance quite well, but as I watch time moving forward and what is done, I'm not 100% certain I'll be able to submit the project in time.
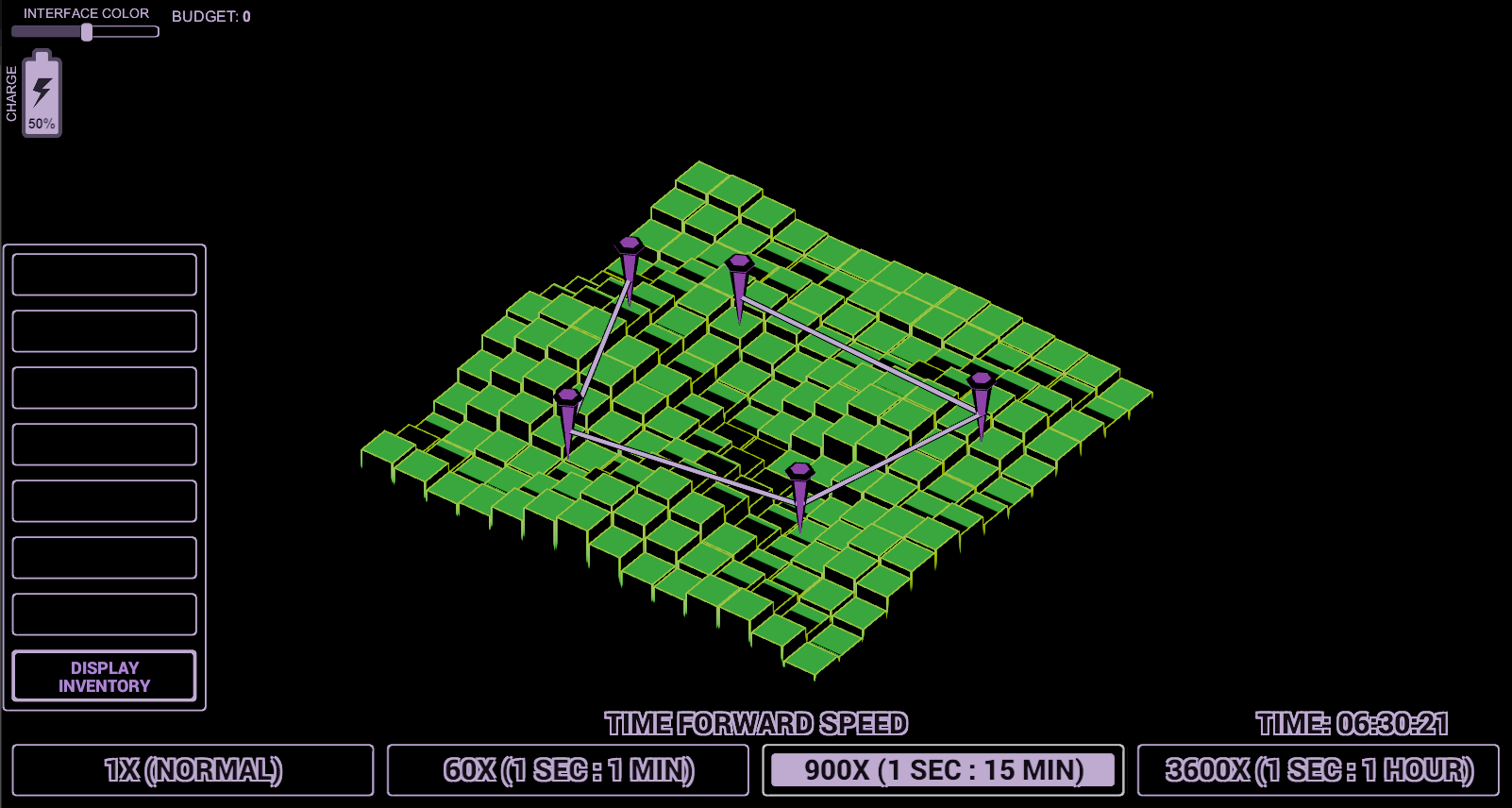
Side note: It's not visible in the screenshot, but that 3D map can be rotated around.
Long story short:
• I have implemented the path/movement system with waypoints as well as the keyboard & mouse and Touchscreen/Pen inputs based controls.
That was the bulk of today's work because I had to implement a waypoint system that allow new additional waypoints to be added and/or replace and/or removed while keeping the existing order of waypoints and all.
The way the controls work is that the player place waypoints put pressing/clicking on the world. Each time a press/click is done, a waypoint is added and the path between active waypoints is updated. If the player presses/click really close to an existing waypoint, this remove the waypoint from the path. The number of waypoints is based on a certain module (which can be ranked up) starting at 2 by default and up to 7 at max rank. If the number of generated waypoint exceed the module's capacity of the Rover, the oldest waypoint is removed.
This was a bit of a headhache to implement because I had to implement a system that allows not only connection between the existing waypoint and the Rover, once in the map, but also between the hidden objective (not visible in the image above) that has been discovered. (So, if a discovered objective is pressed/clicked, a it becomes a waypoint in the Rover path. If a regular existing waypoint is pressed, it's destroyed/removed. If an objective is pressed, it's only removed from the waypoint list, but remains on the map until it's acquired by the rover by reaching it.)
• I have also reworked a few visual elements as well as the visuals so that stuff are much easier to see.
• Only one 3D model remains which is the Landing craft (starting part for the Rover as well as a permanent charging station).
• The time factor has been fully implemented. The game run on a 24-hour time factor where sunlight is available between 06:00:00 up to around 20:00:00. During the night, while it's possible to move the Rover, the power consumption (unless upgraded and still) is a double edged sword. Between 11:00:00 and 13:00:00, the sun up high and there's barely any shadows. I did implement a bit of a cheat where the sun truly stays still for 2 hours, but at the cost of chipping the scale on the rest of the sun-lighted part of the day. It's possible to turn off the Time advance (nothing moves) by toggling off any of the 4 bottom buttons, but setting it at 1X(NORMAL) is actually more or less the same unless in extreme circumstances of last-call around the 19th hour. After all, at 1X(NORMAL), you control the Rover in real-time meaning that it will take a real-time 14 hours from 6h in the game to reach night time.
• 75% of the Rover system is finished. The 25% remaining is related to the landing craft and the sunlight/shadow detection and the inventory and scan system.
One things I have not yet implemented visually is the size of the map in real measures. Each cube/square you see on the map is 1 squared distance unit. I have yet to decide if it's 1 km² or 1 mile². The elevation also has an importance when deciding the Rover's path. Each square represent the average elevation of the area and that's another thing that can get upgraded because the higher the elevation, the slower the Rover will climb (and the opposite is also true where the Rover will move down hills faster.) It's not a linear deceleration, but more like a parabola, hence it might be faster to move around an hill on a smooth elevation than to climb an hard-pressed elevation, but at the same time, that smoother hill could be in the shadowed part, hence comes the dilemma of choosing which route to take, how fast it gets there.
Here a few details about the upgrade-based gameplay element about the Rover.
• Battery Capacity: The rover has a battery default capacity that allows it to cross shadowed area for 2 in-game hours before powering down.
It can be upgraded internally to 200% and it's possible to extend it by 30 minutes with Battery Cells (each take 1 slot in the Rover Inventory)
• Storage Capacity: The rover has a default Storage Capacity of 2 slot and can be upgraded to 7 slots total.
Currently, the slots can be filled with :
+ Sample (By default) - Each Sample objective requires a slot when transported back to the shuttle.
+ Battery Cell - Upgrade the Battery Capacity by a flat 25 units. (this represent 25% of the default Battery capacity)
+ Solar Panel - Upgrade the Battery Recharge speed by 3 units / hour under sunlight. That recharge rate is not affected by mobility (unlike Solar Cells).
+ Robot Arm - Double the acquisition speed of Samples. Acquiring a Sample, by default, takes 30-60 minutes. (The time is semi-random based on a few factors.) During Sample recovery, the Rover consume slightly more energy than usual, hence this part not only might allow 1-2 additional sample to be acquired in a day, it also save half of the energy its consumes.
• Solar Cells: When in sunlight, the rover recharges its batteries. By default it recharges at around 5% (if immobile) or 1% (if mobile) per in-game hour. This can be upgraded up to 200% which means that, in 10 hours (instead of 20) without moving, the Rover would be fully charged.
• Radar Antenna & CPU: (Not yet visible in the UI above) It's possible (and required) to launch a scan from the Rover position at the cost or power. The Radar has a recharge rate of 6 in-game hour, but can be reduced to 1 in-game hour by upgrading the Radar CPU. Just in case some wonder, it does recharge during night time so even at the start, you can launch 2 scans easily. Upgrading the Antenna raise the range of the scan. By default, the range is 5 units in radius around the Rover and can be doubled by adding upgrades.
• Motor Drive & Gears: This is the upgrades that allows to raise the max speed (Drive) as well as dropping the deceleration (Gears) when climbing an hill.
• AI Optimization: This allows the Rover to use less power in general. This drop the power usage of everything, hence it's an Ace-of-All-Trade, but even maxed, the gain is still lesser than something like a maxed Battery or even 2 Battery Cells.
All that might seem overkill for a Dev Jam of 3 days, but it's mostly internal data management with a few UI icon here and there which is why I think I'll be okay, but again something might not work as I intended so it's not 100% guarantied.